
Marte 3 - Mars 3
 Mars 3 Orbiter
| |
| Tipo de missão | orbitador e módulo de pouso |
|---|---|
| Operador |
|
| COSPAR ID | Orbiter: 1971-049A Lander: 1971-049C |
| SATCAT nº | Orbital: 5252 Lander: 5667 |
| Duração da missão | Orbital: 452 dias |
| Propriedades da espaçonave | |
| Massa de lançamento | Orbitador: 3.440 kg (7.580 lb) Lander: 1.210 kg (2.670 lb) |
| Início da missão | |
| Data de lançamento | 15:26:30, 28 de maio de 1971 (UTC) |
| Foguete | Proton-K com Blok D estágio superior |
| Fim da missão | |
| Disposição | Descomissionado |
| Desativado | 22 de agosto de 1972 (orbitador) |
| Último contato | Última transmissão de dados em julho de 1972 |
| Parâmetros orbitais | |
| Sistema de referência | Areocêntrico |
| Orbitador de Marte | |
| Inserção orbital | 2 de dezembro de 1971 |
| Parâmetros orbitais | |
| Altitude de Periareião | 1.500 km (930 mi) |
| Altitude Apoareion | 211.400 km (131.400 mi) |
| Inclinação | 60 ° |
| Sonda marte | |
| Componente da nave espacial | Mars 3 Lander |
| Data de desembarque | 2 de dezembro de 1971 (11 Libra 192 Darian ) 13:52 UTC SCET ( MSD 34809 03:06 AMT ) |
| Local de pouso | 45 ° S 202 ° E / 45 ° S 202 ° E (previsto) |
Mars 3 foi uma sonda espacial robótica do programa soviético de Marte , lançada em 28 de maio de 1971, nove dias depois de sua nave gêmea Marte 2 . As sondas eram naves espaciais robóticas idênticas lançadas por foguetes Proton-K com um estágio superior Blok D , cada uma consistindo em um orbitador e um módulo de aterrissagem acoplado . Depois que a sonda Mars 2 caiu na superfície marciana, a sonda Mars 3 se tornou a primeira espaçonave a atingir um pouso suave em Marte, em 2 de dezembro de 1971. Ela falhou 110 segundos após o pouso, tendo transmitido apenas uma imagem cinza sem detalhes. O orbitador Marte 2 e o orbitador Marte 3 continuaram a circundar Marte e transmitir imagens de volta à Terra por mais oito meses.
Visão geral
- Data / hora de lançamento:
- 3 de março: 28 de maio de 1971 às 15:26:30 UTC
- Massa de lançamento (incluindo combustível):
- Combinado: 4.650 kg (10.250 lb)
- Orbitador: 3.440 kg (7.580 lb)
- Lander: 1.210 kg (2.670 lb)
- Massa seca em órbita: 2.265 kg (4.993 lb)
- Dimensões: 4,1 m (13,5 pés) de altura, 2 m (6,6 pés) de largura (5,9 m (19,4 pés) de largura com painéis solares implantados)
Orbiter
O objetivo principal do orbitador 4M-V era estudar a topografia da superfície marciana; analisar a composição do solo; medir várias propriedades da atmosfera; monitorar "a radiação solar, o vento solar e os campos magnéticos interplanetários e marcianos". Além disso, serviu como um "relé de comunicação para enviar sinais da sonda para a Terra".
O orbitador sofreu uma perda parcial de combustível e não tinha o suficiente para se colocar em uma órbita planejada de 25 horas. Em vez disso, o motor executou uma queima truncada para colocar a espaçonave em uma órbita altamente elíptica de longo período (12 dias, 19 horas) em torno de Marte.
Por coincidência, uma tempestade de poeira particularmente grande em Marte afetou negativamente a missão. Quando a Mariner 9 chegou e orbitou Marte com sucesso em 14 de novembro de 1971, apenas duas semanas antes de Marte 2 e Marte 3, os cientistas planetários ficaram surpresos ao descobrir que a atmosfera era densa com "um manto de poeira que abrange todo o planeta , a maior tempestade já observada " A superfície estava totalmente obscurecida. Incapazes de reprogramar os computadores da missão, ambos Mars 2 e Mars 3 despacharam seus landers imediatamente, e os orbitadores usaram uma porção significativa de seus recursos de dados disponíveis ao capturar imagens das nuvens de poeira sem características.
O orbitador Mars 3 enviou dados cobrindo o período de dezembro de 1971 a março de 1972, embora as transmissões continuassem até agosto. Foi anunciado que o Mars 3 completou sua missão em 22 de agosto de 1972, após 20 órbitas. A sonda, combinada com Marte 2, enviou de volta um total de 60 fotos. As imagens e dados revelaram montanhas de até 22 km, hidrogênio atômico e oxigênio na alta atmosfera, temperaturas de superfície variando de -110 ° C a +13 ° C, pressões de superfície de 5,5 a 6 mb, concentrações de vapor de água 5.000 vezes menores que na atmosfera da Terra, a base da ionosfera começando de 80 a 110 km de altitude, e grãos de tempestades de poeira de até 7 km na atmosfera. As imagens e dados permitiram a criação de mapas de relevo de superfície e forneceram informações sobre a gravidade marciana e os campos magnéticos .
Lander

Sistema de nave espacial Lander
O módulo de descida do Mars 3 foi montado no barramento / orbitador oposto ao sistema de propulsão. Consistia em uma cápsula de pouso esférica de 1,2 m de diâmetro, um escudo de freio aerodinâmico cônico de 2,9 m de diâmetro, um sistema de pára-quedas e retro-foguetes.
Todo o módulo de descida tinha uma massa alimentada de 1210 kg, a cápsula de pouso esférica respondia por 358 kg disso. Um sistema de controle automático consistindo de micromotores a gás e recipientes de nitrogênio pressurizado fornecia controle de atitude. Quatro motores de combustível sólido foram montados na borda externa do cone para controlar a inclinação e a guinada.
Os pára-quedas principal e auxiliar, o motor para iniciar o pouso e o altímetro do radar foram montados na seção superior do módulo de pouso. A espuma foi usada para absorver o choque dentro do módulo de descida. A cápsula de pouso tinha quatro pétalas triangulares que se abriam após o pouso, endireitando a espaçonave e expondo a instrumentação.
A sonda foi equipada com duas câmeras de televisão com visão de 360 graus da superfície, bem como um espectrômetro de massa para estudar a composição atmosférica; sensores de temperatura, pressão e vento; e dispositivos para medir as propriedades mecânicas e químicas da superfície, incluindo uma concha mecânica para procurar materiais orgânicos e sinais de vida. Também continha uma flâmula com o brasão de armas soviético.
Quatro antenas projetavam-se do topo da esfera para fornecer comunicação com o orbitador por meio de um sistema de rádio a bordo. O equipamento era alimentado por baterias que eram carregadas pelo orbitador antes da separação. O controle da temperatura foi mantido por meio de isolamento térmico e sistema de radiadores. A cápsula de pouso foi esterilizada antes do lançamento para evitar a contaminação do ambiente marciano.
Prop-M Rover

A sonda Mars 3, um chamado Veículo de Estimativa de Passabilidade para Marte, foi projetada e fabricada no Instituto de Engenharia de Veículos Móveis por uma equipe de aproximadamente 150 engenheiros, liderados por Alexander Kemurdzhian . O veículo tinha um pequeno ' Mars rover ' a bordo, que foi planejado para se mover pela superfície em esquis enquanto conectado ao módulo de pouso por um cabo umbilical de 15 metros . Duas pequenas hastes de metal foram usadas para evitar obstáculos autônomos, já que os sinais de rádio da Terra demorariam muito para conduzir os rovers usando o controle remoto. O rover carregava um penetrômetro dinâmico e um densitômetro de raios gama .
A estrutura principal do PROP-M era uma caixa de agachamento de 4,5 kg (9,9 Lb) (25 cm x 22 cm x 4 cm) com uma pequena protrusão no centro. A estrutura era apoiada em dois esquis largos e planos, um se estendendo de cada lado, elevando a estrutura ligeiramente acima da superfície. Na frente da caixa, havia barras de detecção de obstáculos. O rover foi planejado para ser colocado na superfície após o pouso por um braço manipulador e se mover no campo de visão das câmeras de televisão e parar para fazer as medições a cada 1,5 metros. Devido à perda de comunicação, não se sabe se o rover PROP-M foi implantado.
Uma animação do rover PROP-M em ação está disponível em: animação do Mars 3 Rover
Entrada, descida, pouso, transmissão e falha
O módulo de descida de Mars 3 foi lançado às 09:14 UT em 2 de dezembro de 1971, 4 horas e 35 minutos antes de chegar a Marte. O módulo de descida entrou na atmosfera marciana a aproximadamente 5,7 km / s. Por meio de frenagem aerodinâmica , pára-quedas e retrobancos , o módulo de pouso conseguiu um pouso suave a 45 ° S 202 ° E / 45 ° S 202 ° E Coordenadas : 45 ° S 202 ° E / 45 ° S 202 ° E e iniciou as operações.
A sonda começou a transmitir para o orbitador Marte 3 90 segundos após o pouso. Após 20 segundos, a transmissão foi interrompida por motivos desconhecidos. Não se sabe se a falha teve origem no módulo de pouso ou no relé de comunicação do orbitador. A causa da falha pode estar relacionada à extremamente poderosa tempestade de poeira marciana ocorrendo no momento, que pode ter induzido uma descarga coronal , danificando o sistema de comunicações. A tempestade de poeira também explicaria a má iluminação da imagem.
Uma imagem parcial (70 linhas) foi transmitida. De acordo com VG Perminov, o designer-chefe da espaçonave de Marte e Vênus no escritório de design de Lavochkin durante os primeiros dias da exploração de Marte, a imagem era "um fundo cinza sem detalhes".
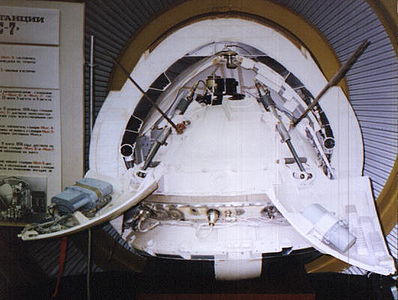
Uma vista em corte da Mars 3 Lander no NPO Lavochkin Museum.

Possíveis imagens da sonda em Marte
Em 11 de abril de 2013, a NASA anunciou que o Mars Reconnaissance Orbiter (MRO) pode ter imaginado o hardware da sonda Mars 3 na superfície de Marte. A câmera HiRISE no MRO tirou imagens do que pode ser o pára - quedas , retrorockets , escudo térmico e módulo de pouso . Esta descoberta foi feita por entusiastas do espaço amadores, olhando através de imagens arquivadas publicamente disponíveis.

Veja também
Referências
links externos
- Site da sonda marte da NASA
- "The Difficult Road to Mars", de VG Perminov
- Página Lavochkin em Marte-3 (em russo)
- Página de Ted Stryk sobre a Mars 3 Probe
- Aviso TASS no pouso de Mars-3 (em russo) ( Wikisource )
- "The Rocky Soviet Road to Mars", de Larry Klaes - EJASA, outubro de 1989
- Documentário soviético sobre a missão M71 (1971-1973) (Youtube, legendas em inglês)
- Catálogo de imagens da Sonda Soviética de Marte
