
Projeção do mapa - Map projection

Na cartografia , a projeção de um mapa é uma maneira de achatar a superfície de um globo em um plano para fazer um mapa. Isso requer uma transformação sistemática das latitudes e longitudes dos locais da superfície do globo em locais em um plano .
Todas as projeções de uma esfera em um plano necessariamente distorcem a superfície de alguma forma e em alguma extensão. Dependendo do propósito do mapa, algumas distorções são aceitáveis e outras não; portanto, existem diferentes projeções de mapas para preservar algumas propriedades do corpo esférico em detrimento de outras propriedades. O estudo das projeções cartográficas é a caracterização das distorções. Não há limite para o número de projeções de mapas possíveis. As projeções são assunto de vários campos da matemática pura, incluindo geometria diferencial , geometria projetiva e variedades . No entanto, "projeção de mapa" se refere especificamente a uma projeção cartográfica .
Apesar do significado literal do nome, a projeção não se limita às projeções em perspectiva , como as resultantes da projeção de uma sombra em uma tela, ou a imagem retilínea produzida por uma câmera pinhole em uma placa de filme plana. Em vez disso, qualquer função matemática que transforme as coordenadas da superfície curva de maneira distinta e suave no plano é uma projeção. Poucas projeções em uso prático são em perspectiva.
A maior parte deste artigo assume que a superfície a ser mapeada é a de uma esfera. A Terra e outros grandes corpos celestes são geralmente melhor modelados como esferóides achatados , enquanto pequenos objetos, como asteróides, geralmente têm formas irregulares. As superfícies dos corpos planetários podem ser mapeadas mesmo se forem muito irregulares para serem bem modeladas com uma esfera ou elipsóide. Portanto, de forma mais geral, uma projeção de mapa é qualquer método de achatar uma superfície curva contínua em um plano.
Um globo modelo não distorce as relações de superfície da mesma forma que os mapas, mas os mapas podem ser mais úteis em muitas situações: eles são mais compactos e fáceis de armazenar; eles acomodam prontamente uma enorme variedade de escalas; eles são vistos facilmente em monitores de computador; eles podem ser medidos para encontrar propriedades da região que está sendo mapeada; eles podem mostrar porções maiores da superfície da Terra de uma vez; e são mais baratos de produzir e transportar. Essas características úteis de mapas motivam o desenvolvimento de projeções de mapas.
A projeção de mapa mais conhecida é a projeção de Mercator . Apesar de suas propriedades conformais importantes, ele foi criticado ao longo do século XX por aumentar a área além do equador. Projeções de mapas de áreas iguais, como a projeção Senoidal e a projeção de Gall-Peters, mostram os tamanhos corretos dos países em relação uns aos outros, mas distorcem os ângulos. A National Geographic Society e a maioria dos atlas favorecem projeções de mapas que comprometem entre a área e a distorção angular, como a projeção de Robinson ou a projeção tripel de Winkel
Propriedades métricas de mapas

Muitas propriedades podem ser medidas na superfície da Terra, independentemente de sua geografia:
As projeções do mapa podem ser construídas para preservar algumas dessas propriedades em detrimento de outras. Como a superfície curva da Terra não é isométrica a um plano, a preservação das formas leva inevitavelmente a uma escala variável e, conseqüentemente, à apresentação não proporcional das áreas. Vice-versa, uma projeção com preservação de área não pode ser conforme , resultando em formas e rolamentos distorcidos na maioria dos lugares do mapa. Cada projeção preserva, compromete ou aproxima as propriedades métricas básicas de maneiras diferentes. O objetivo do mapa determina qual projeção deve formar a base do mapa. Como existem muitos propósitos para mapas, uma diversidade de projeções foi criada para atender a esses propósitos.
Outra consideração na configuração de uma projeção é sua compatibilidade com os conjuntos de dados a serem usados no mapa. Os conjuntos de dados são informações geográficas; sua coleção depende do datum (modelo) escolhido da Terra. Datums diferentes atribuem coordenadas ligeiramente diferentes ao mesmo local, portanto, em mapas de grande escala , como os de sistemas de mapeamento nacionais, é importante combinar o datum com a projeção. As pequenas diferenças na atribuição de coordenadas entre diferentes datums não é uma preocupação para mapas mundiais ou outros vastos territórios, onde tais diferenças são reduzidas à imperceptibilidade.
Distorção
O Teorema Egregium de Carl Friedrich Gauss provou que a superfície de uma esfera não pode ser representada em um plano sem distorção. O mesmo se aplica a outras superfícies de referência usadas como modelos para a Terra, como esferóides oblatos , elipsóides e geoides . Como qualquer projeção de mapa é uma representação de uma dessas superfícies em um plano, todas as projeções de mapa se distorcem.

A maneira clássica de mostrar a distorção inerente a uma projeção é usar a indicatriz de Tissot. Para um determinado ponto, usando o fator de escala h ao longo do meridiano, o fator de escala k ao longo do paralelo e o ângulo θ ′ entre eles, Nicolas Tissot descreveu como construir uma elipse que caracteriza a quantidade e orientação dos componentes de distorção. Ao espaçar as elipses regularmente ao longo dos meridianos e paralelos, a rede de indicatrizes mostra como a distorção varia no mapa.
Outras métricas de distorção
Muitas outras maneiras foram descritas para caracterizar a distorção nas projeções. Como a indicatriz de Tissot, a indicatriz Goldberg-Gott é baseada em infinitesimais e representa distorções de flexão e assimetria (curvatura e assimetria ).
Em vez do círculo infinitesimal original (ampliado) como na indicatriz de Tissot, alguns métodos visuais projetam formas finitas que abrangem uma parte do mapa. Por exemplo, um pequeno círculo de raio fixo (por exemplo, raio angular de 15 graus ). Às vezes, triângulos esféricos são usados. Na primeira metade do século 20, projetar uma cabeça humana em diferentes projeções era comum para mostrar como a distorção varia entre uma projeção e outra. Em mídia dinâmica, formas de linhas costeiras e limites familiares podem ser arrastadas por um mapa interativo para mostrar como a projeção distorce tamanhos e formas de acordo com a posição no mapa.
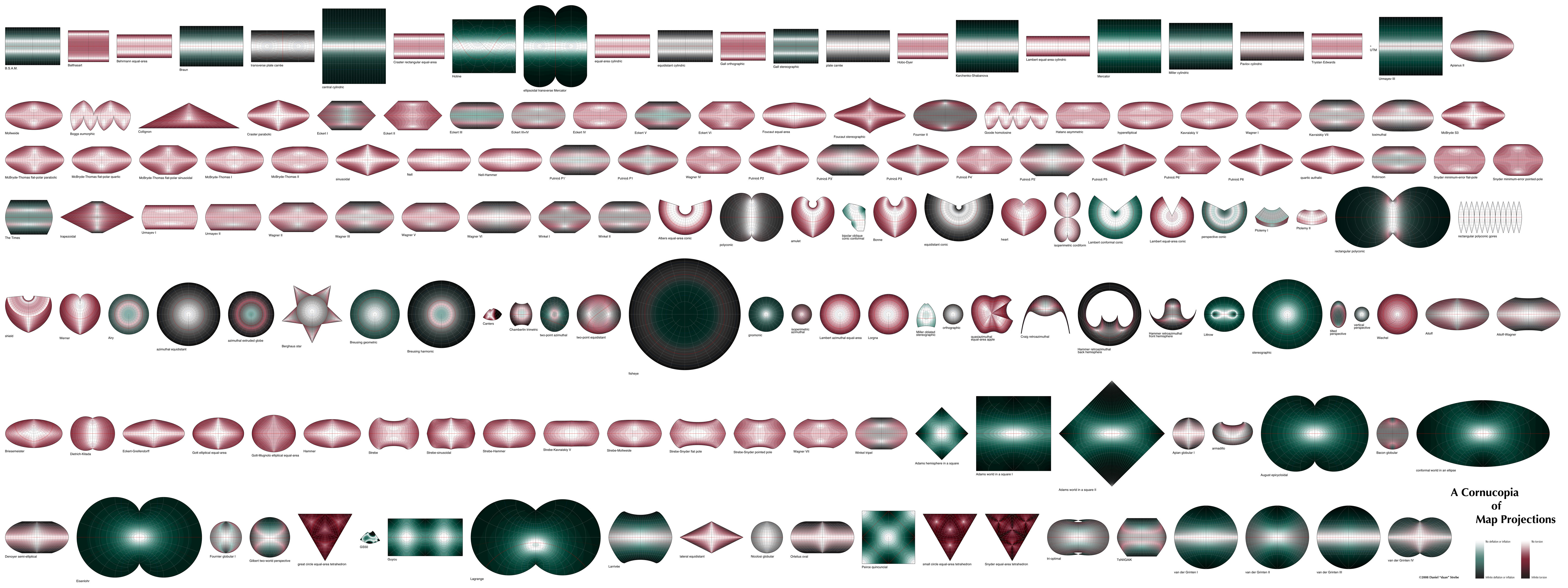
Outra maneira de visualizar a distorção local é por meio de tons de cinza ou gradações de cores cuja tonalidade representa a magnitude da deformação angular ou inflação de área. Às vezes, ambos são mostrados simultaneamente pela combinação de duas cores para criar um mapa bivariado .
O problema de caracterizar a distorção globalmente entre áreas, em vez de apenas em um único ponto, é que necessariamente envolve a escolha de prioridades para chegar a um acordo. Alguns esquemas usam distorção de distância como um substituto para a combinação de deformação angular e inflação de área; tais métodos escolhem arbitrariamente quais caminhos medir e como ponderá-los para produzir um único resultado. Muitos foram descritos.
Design e construção
A criação de uma projeção de mapa envolve duas etapas:
- Seleção de um modelo para a forma da Terra ou corpo planetário (geralmente escolhendo entre uma esfera ou elipsóide ). Como a forma real da Terra é irregular, as informações são perdidas nesta etapa.
- Transformação de coordenadas geográficas ( longitude e latitude ) em coordenadas cartesianas ( x , y ) ou no plano polar . Em mapas de grande escala, as coordenadas cartesianas normalmente têm uma relação simples com as direções leste e norte definidas como uma grade sobreposta na projeção. Em mapas de pequena escala, as direções leste e norte não são significativas e as grades não são sobrepostas.
Algumas das projeções de mapa mais simples são projeções literais, obtidas colocando uma fonte de luz em algum ponto definido em relação ao globo e projetando seus recursos em uma superfície especificada. Embora a maioria das projeções não seja definida dessa maneira, imaginar o modelo da fonte de luz-globo pode ser útil para entender o conceito básico de uma projeção de mapa.
Escolha de uma superfície de projeção

Uma superfície que pode ser desdobrada ou desenrolada em um plano ou folha sem esticar, rasgar ou encolher é chamada de superfície revelável . O cilindro , o cone e o plano são todas superfícies desenvolvíveis. A esfera e o elipsóide não têm superfícies reveláveis, então qualquer projeção deles em um plano terá que distorcer a imagem. (Para comparar, não se pode achatar uma casca de laranja sem rasgá-la e empená-la.)
Uma maneira de descrever uma projeção é primeiro projetar da superfície da Terra para uma superfície desenvolvível, como um cilindro ou cone, e então desenrolar a superfície em um plano. Enquanto a primeira etapa inevitavelmente distorce algumas propriedades do globo, a superfície desenvolvível pode então ser desdobrada sem distorção adicional.
Aspecto da projeção

Uma vez que a escolha é feita entre projetar em um cilindro, cone ou plano, o aspecto da forma deve ser especificado. O aspecto descreve como a superfície desenvolvível é colocada em relação ao globo: pode ser normal (de modo que o eixo de simetria da superfície coincida com o eixo da Terra), transversal (em ângulos retos com o eixo da Terra) ou oblíqua (qualquer ângulo entre )
Linhas notáveis

A superfície revelável também pode ser tangente ou secante à esfera ou elipsóide. Tangente significa que a superfície toca, mas não corta o globo; secante significa que a superfície corta o globo. Mover a superfície desenvolvível para longe do contato com o globo nunca preserva ou otimiza as propriedades métricas, de modo que essa possibilidade não é discutida mais adiante aqui.
As linhas tangentes e secantes ( linhas padrão ) são representadas sem distorções. Se essas linhas são um paralelo de latitude, como nas projeções cônicas, é chamado de paralelo padrão . O meridiano central é o meridiano para o qual o globo é girado antes de se projetar. O meridiano central (geralmente escrito λ 0 ) e um paralelo de origem (geralmente escrito φ 0 ) são freqüentemente usados para definir a origem da projeção do mapa.
Escala
Um globo é a única forma de representar a Terra com escala constante em todo o mapa em todas as direções. Um mapa não pode atingir essa propriedade para qualquer área, não importa quão pequena. Pode, no entanto, atingir escala constante ao longo de linhas específicas.
Algumas propriedades possíveis são:
- A escala depende da localização, mas não da direção. Isso é equivalente à preservação de ângulos, a característica definidora de um mapa conforme .
- A escala é constante ao longo de qualquer paralelo na direção do paralelo. Isso se aplica a qualquer projeção cilíndrica ou pseudocilíndrica em aspecto normal.
- Combinação das opções acima: a escala depende apenas da latitude, não da longitude ou direção. Isso se aplica à projeção Mercator em aspecto normal.
- A escala é constante ao longo de todas as linhas retas que irradiam de uma localização geográfica específica. Esta é a característica definidora de uma projeção equidistante, como a projeção equidistante azimutal . Existem também projeções (projeção equidistante de dois pontos de Maurer , Fechar) onde as distâncias verdadeiras de dois pontos são preservadas.
Escolhendo um modelo para a forma do corpo
A construção da projeção também é afetada pela forma como a forma da Terra ou do corpo planetário é aproximada. Na seção seguinte sobre categorias de projeção, a terra é considerada uma esfera para simplificar a discussão. No entanto, a forma real da Terra está mais próxima de um elipsóide achatado . Quer sejam esféricos ou elipsoidais, os princípios discutidos são válidos sem perda de generalidade.
Selecionar um modelo para uma forma da Terra envolve escolher entre as vantagens e desvantagens de uma esfera versus um elipsóide. Os modelos esféricos são úteis para mapas em pequena escala, como atlas mundiais e globos, uma vez que o erro nessa escala geralmente não é perceptível ou importante o suficiente para justificar o uso do elipsóide mais complicado. O modelo elipsoidal é comumente usado para construir mapas topográficos e para outros mapas de grande e média escala que precisam representar com precisão a superfície da terra. Latitudes auxiliares são freqüentemente empregadas na projeção do elipsóide.
Um terceiro modelo é o geóide , uma representação mais complexa e precisa da forma da Terra coincidente com o que seria o nível do mar médio se não houvesse ventos, marés ou terra. Comparado ao elipsóide de melhor ajuste, um modelo geoidal mudaria a caracterização de propriedades importantes, como distância, conformalidade e equivalência . Portanto, em projeções geoidais que preservam tais propriedades, a gratícula mapeada se desviaria da gratícula de um elipsóide mapeado. Normalmente, o geóide não é usado como um modelo da Terra para projeções, no entanto, porque a forma da Terra é muito regular, com a ondulação do geóide chegando a menos de 100 m do modelo elipsoidal de 6,3 milhões de m de raio da Terra . Para corpos planetários irregulares como asteróides , entretanto, às vezes modelos análogos ao geóide são usados para projetar mapas.
Outros sólidos regulares são às vezes usados como generalizações para o equivalente geoidal de corpos menores. Por exemplo, Io é melhor modelado por elipsóide triaxial ou esferóide prolatado com pequenas excentricidades. A forma de Haumea é um elipsóide Jacobi , com seu eixo maior duas vezes mais longo que o menor e com seu eixo médio uma vez e meia maior que o menor. Veja a projeção do mapa do elipsóide triaxial para maiores informações.
Classificação
Uma classificação de projeção fundamental é baseada no tipo de superfície de projeção na qual o globo é projetado conceitualmente. As projeções são descritas em termos de colocar uma superfície gigantesca em contato com a Terra, seguido por uma operação de escala implícita. Essas superfícies são cilíndricas (por exemplo, Mercator ), cônicas (por exemplo, Albers ) e planas (por exemplo, estereográficas ). Muitas projeções matemáticas, entretanto, não se encaixam perfeitamente em nenhum desses três métodos de projeção conceitual. Portanto, outras categorias de pares foram descritas na literatura, como pseudocônica, pseudocilíndrica, pseudoazimutal, retroazimutal e policônica .
Outra forma de classificar as projeções é de acordo com as propriedades do modelo que preservam. Algumas das categorias mais comuns são:
- Preservando a direção ( azimutal ou zenital ), uma característica possível apenas de um ou dois pontos para todos os outros pontos
- Preservando a forma localmente ( conforme ou ortomórfico )
- Preservando a área (área igual ou equiareal ou equivalente ou autálica )
- Preservando a distância ( equidistante ), uma característica possível apenas entre um ou dois pontos e todos os outros pontos
- Preservando a rota mais curta, uma característica preservada apenas pela projeção gnomônica
Como a esfera não é uma superfície desenvolvível , é impossível construir uma projeção de mapa que seja ao mesmo tempo igual e conforme.
Projeções por superfície
As três superfícies reveláveis (plano, cilindro, cone) fornecem modelos úteis para compreender, descrever e desenvolver projeções de mapas. No entanto, esses modelos são limitados de duas maneiras fundamentais. Por um lado, a maioria das projeções de mundo em uso não se enquadra em nenhuma dessas categorias. Por outro lado, mesmo a maioria das projeções que se enquadram nessas categorias não são naturalmente atingíveis por meio da projeção física. Como LP Lee observa,
Nenhuma referência foi feita nas definições acima a cilindros, cones ou planos. As projeções são denominadas cilíndricas ou cônicas porque podem ser consideradas desenvolvidas em um cilindro ou em um cone, conforme o caso, mas convém dispensar a representação de cilindros e cones, já que deram origem a muitos mal-entendidos. Particularmente é assim com relação às projeções cônicas com dois paralelos padrão: elas podem ser consideradas como desenvolvidas em cones, mas são cones que não têm uma relação simples com a esfera. Na realidade, cilindros e cones nos fornecem termos descritivos convenientes, mas pouco mais.
A objeção de Lee refere-se à maneira como os termos cilíndrico , cônico e plano (azimutal) foram abstraídos no campo das projeções cartográficas. Se os mapas fossem projetados como uma luz brilhando através de um globo em uma superfície revelável, então o espaçamento dos paralelos seguiria um conjunto muito limitado de possibilidades. Essa projeção cilíndrica (por exemplo) é aquela que:
- É retangular;
- Tem meridianos verticais retos, espaçados uniformemente;
- Tem paralelos retos simetricamente colocados sobre o equador;
- Tem paralelos restritos a onde eles caem quando a luz brilha através do globo para o cilindro, com a fonte de luz em algum lugar ao longo da linha formada pela intersecção do meridiano principal com o equador e o centro da esfera.
(Se você girar o globo antes de projetar, os paralelos e meridianos não serão necessariamente linhas retas. As rotações são normalmente ignoradas para fins de classificação.)
Onde a fonte de luz emana ao longo da linha descrita nesta última restrição é o que produz as diferenças entre as várias projeções cilíndricas "naturais". Mas o termo cilíndrico, conforme usado no campo de projeções de mapas, relaxa totalmente a última restrição. Em vez disso, os paralelos podem ser colocados de acordo com qualquer algoritmo que o designer tenha decidido se adequar às necessidades do mapa. A famosa projeção de Mercator é aquela em que a colocação de paralelos não surge por projeção; em vez disso, os paralelos são colocados como devem ser para satisfazer a propriedade de que um curso de direção constante é sempre plotado como uma linha reta.
Cilíndrico

Uma projeção cilíndrica normal é qualquer projeção em que meridianos são mapeados para linhas verticais igualmente espaçadas e círculos de latitude (paralelos) são mapeados para linhas horizontais.
O mapeamento de meridianos em linhas verticais pode ser visualizado imaginando um cilindro cujo eixo coincide com o eixo de rotação da Terra. Este cilindro é enrolado ao redor da Terra, projetado e então desenrolado.
Pela geometria de sua construção, as projeções cilíndricas estendem-se nas distâncias leste-oeste. A quantidade de extensão é a mesma em qualquer latitude escolhida em todas as projeções cilíndricas e é dada pela secante da latitude como um múltiplo da escala do equador. As várias projeções cilíndricas são distinguidas umas das outras apenas por seu alongamento norte-sul (onde a latitude é dada por φ):
- O alongamento norte-sul é igual ao alongamento leste-oeste ( sec φ ): A escala leste-oeste corresponde à escala norte-sul: cilíndrico conformal ou Mercator ; isso distorce áreas excessivamente em latitudes altas (ver também Mercator transversal ).
- O alongamento norte-sul cresce com a latitude mais rápido do que o alongamento leste-oeste (sec 2 φ ): A projeção em perspectiva cilíndrica (ou cilíndrica central ); inadequado porque a distorção é ainda pior do que na projeção de Mercator.
- O alongamento norte-sul cresce com a latitude, mas menos rapidamente do que o alongamento leste-oeste: como a projeção cilíndrica de Miller (sec 4/5φ ).
- Distâncias Norte-Sul nem alongadas nem comprimidas (1): projeção equirretangular ou " carré de placa".
- A compressão norte-sul é igual ao cosseno da latitude (o recíproco do alongamento leste-oeste): cilíndrico de área igual . Esta projeção tem muitas especializações nomeadas que diferem apenas na constante de escala, como Gall-Peters ou Gall ortográfica (sem distorção nos paralelos de 45 °), Behrmann (sem distorção nos paralelos de 30 °) e área igual cilíndrica de Lambert (sem distorção em O equador). Como essa projeção escala as distâncias norte-sul pelo recíproco do alongamento leste-oeste, ela preserva área em detrimento das formas.
No primeiro caso (Mercator), a escala leste-oeste sempre é igual à escala norte-sul. No segundo caso (cilíndrico central), a escala norte-sul excede a escala leste-oeste em todos os pontos distantes do equador. Cada caso restante tem um par de linhas secantes - um par de latitudes idênticas de sinal oposto (ou então o equador) em que a escala leste-oeste coincide com a escala norte-sul.
As projeções cilíndricas normais mapeiam toda a Terra como um retângulo finito, exceto nos dois primeiros casos, onde o retângulo se estende infinitamente alto, mas mantém a largura constante.
Pseudocilíndrico

As projeções pseudocilíndricas representam o meridiano central como um segmento de linha reta. Outros meridianos são mais longos que o meridiano central e se curvam para fora, afastando-se do meridiano central. As projeções pseudocilíndricas mapeiam paralelos como linhas retas. Ao longo dos paralelos, cada ponto da superfície é mapeado a uma distância do meridiano central que é proporcional à sua diferença de longitude em relação ao meridiano central. Portanto, os meridianos são igualmente espaçados ao longo de um determinado paralelo. Em um mapa pseudocilíndrico, qualquer ponto mais distante do equador do que algum outro ponto tem uma latitude mais alta do que o outro ponto, preservando as relações norte-sul. Esse traço é útil para ilustrar fenômenos que dependem da latitude, como o clima. Exemplos de projeções pseudocilíndricas incluem:
- Sinusoidal , que foi a primeira projeção pseudocilíndrica desenvolvida. No mapa, como na realidade, o comprimento de cada paralelo é proporcional ao cosseno da latitude. A área de qualquer região é verdadeira.
- Projeção de Collignon , que em suas formas mais comuns representa cada meridiano como dois segmentos de linha reta, um de cada pólo ao equador.
|
|
|
|
|
|
|
|





Híbrido
A projeção HEALPix combina uma projeção cilíndrica de área igual em regiões equatoriais com a projeção Collignon em áreas polares.
Cônica
O termo "projeção cônica" é usado para se referir a qualquer projeção em que os meridianos são mapeados para linhas igualmente espaçadas que irradiam do vértice e os círculos de latitude (paralelos) são mapeados para arcos circulares centrados no vértice.
Ao fazer um mapa cônico, o criador do mapa escolhe arbitrariamente dois paralelos padrão. Esses paralelos padrão podem ser visualizados como linhas secantes onde o cone cruza o globo - ou, se o cartógrafo escolher o mesmo paralelo duas vezes, como a linha tangente onde o cone é tangente ao globo. O mapa cônico resultante tem baixa distorção em escala, forma e área perto desses paralelos padrão. As distâncias ao longo dos paralelos ao norte de ambos os paralelos padrão ou ao sul de ambos os paralelos padrão são alongadas; as distâncias ao longo dos paralelos entre os paralelos padrão são compactadas. Quando um único paralelo padrão é usado, as distâncias ao longo de todos os outros paralelos são aumentadas.
As projeções cônicas comumente usadas são:
- Cônica equidistante , que mantém os paralelos uniformemente espaçados ao longo dos meridianos para preservar uma escala de distância constante ao longo de cada meridiano, tipicamente a mesma escala ou escala semelhante ao dos paralelos padrão.
- Albers cônica , que ajusta a distância norte-sul entre paralelos não padrão para compensar o alongamento ou compressão leste-oeste, dando um mapa de área igual.
- Cônica conformada de Lambert , que ajusta a distância norte-sul entre paralelos não padronizados para igualar o alongamento leste-oeste, dando um mapa conforme.
Pseudocônico
- Bonne , uma projeção de área igual na qual a maioria dos meridianos e paralelos aparecem como linhas curvas. Possui um paralelo padrão configurável ao longo do qual não há distorção.
- Cordiforme de Werner , em que as distâncias são corretas de um pólo, bem como ao longo de todos os paralelos.
- Polyconic americano e outras projeções na classe de projeção policônica .
Azimutal (projeções em um avião)

As projeções azimutais têm a propriedade de que as direções de um ponto central são preservadas e, portanto, grandes círculos através do ponto central são representados por linhas retas no mapa. Essas projeções também têm simetria radial nas escalas e, portanto, nas distorções: as distâncias do mapa do ponto central são calculadas por uma função r ( d ) da distância verdadeira d , independente do ângulo; correspondentemente, os círculos com o ponto central como centro são mapeados em círculos que têm como centro o ponto central no mapa.
O mapeamento de linhas radiais pode ser visualizado imaginando um plano tangente à Terra, tendo o ponto central como ponto tangente.
A escala radial é r ′ ( d ) e a escala transversal r ( d ) / ( R sin d/R) em que R é o raio da Terra.
Algumas projeções azimutais são projeções em perspectiva verdadeira ; ou seja, eles podem ser construídos mecanicamente, projetando a superfície da Terra ao estender linhas de um ponto de perspectiva (ao longo de uma linha infinita através do ponto tangente e antípoda do ponto tangente ) até o plano:
- A projeção gnomônica exibe grandes círculos como linhas retas. Pode ser construída usando um ponto de perspectiva no centro da Terra. r ( d ) = c tan d/R; de forma que mesmo apenas um hemisfério já é infinito em extensão.
- A projeção ortográfica mapeia cada ponto da Terra até o ponto mais próximo do plano. Pode ser construída a partir de um ponto de vista a uma distância infinita do ponto tangente; r ( d ) = c sen d/R. Pode exibir até um hemisfério em um círculo finito. Fotografias da Terra muito distantes, como a Lua , aproximam-se dessa perspectiva.
- Projeção em perspectiva quase lateral, que simula a visão do espaço a uma distância finita e, portanto, mostra menos do que um hemisfério completo, como usado em The Blue Marble 2012 ).
- A projeção em Perspectiva Geral pode ser construída usando um ponto de perspectiva fora da Terra. Fotografias da Terra (como as da Estação Espacial Internacional ) fornecem essa perspectiva. É uma generalização da projeção em perspectiva lateral, permitindo a inclinação.
- A projeção estereográfica , que é conforme, pode ser construída usando o antípoda do ponto tangente como ponto de perspectiva. r ( d ) = c tan d/2 R; a escala é c / (2 R cos 2 d/2 R) Pode exibir quase toda a superfície da esfera em um círculo finito. A superfície total da esfera requer um mapa infinito.
Outras projeções azimutais não são projeções de perspectiva verdadeira :
- Equidistante azimutal : r ( d ) = cd ; é usado por operadores de rádio amador para saber a direção para apontar suas antenas em direção a um ponto e ver a distância até ele. A distância do ponto tangente no mapa é proporcional à distância da superfície da Terra (; para o caso em que o ponto tangente é o Pólo Norte, consulte a bandeira das Nações Unidas )
- Área igual azimutal de Lambert . A distância do ponto tangente no mapa é proporcional à distância em linha reta através da Terra: r ( d ) = c sin d/2 R
- O azimutal logarítmico é construído de forma que a distância de cada ponto do centro do mapa seja o logaritmo de sua distância do ponto tangente na Terra. r ( d ) = c ln d/d 0); locais mais próximos do que a uma distância igual à constante d 0 não são mostrados.

{kind=link}
Projeções pela preservação de uma propriedade métrica

Conforme
As projeções conformais ou ortomórficas do mapa preservam os ângulos localmente, o que implica que elas mapeiam círculos infinitesimais de tamanho constante em qualquer lugar da Terra para círculos infinitesimais de tamanhos variados no mapa. Em contraste, os mapeamentos que não são conformes distorcem a maioria desses pequenos círculos em elipses de distorção . Uma consequência importante da conformidade é que os ângulos relativos em cada ponto do mapa estão corretos e a escala local (embora varie ao longo do mapa) em todas as direções em torno de qualquer ponto é constante. Estas são algumas projeções conformes:
- Mercator : linhas Rhumb são representadas por segmentos retos
- Mercator transversal
- Estereográfico : qualquer círculo de uma esfera , grande ou pequena, é mapeado em um círculo ou linha reta.
- Roussilhe
- Lambert conformal cônica
- Projeção quincuncial de Peirce
- Projeção hemisférica quadrada de Adams
- Projeção do hemisfério em um quadrado de Guyou
Área igual

Mapas de área igual preservam a medida de área, geralmente distorcendo formas para fazer isso. Mapas de área igual também são chamados de equivalentes ou authalic . Estas são algumas projeções que preservam a área:
- Cônica de Albers
- Bonne
- Bottomley
- Collignon
- Área cilíndrica igual
- Eckert II , IV e VI
- Equal Earth
- Gall ortográfica (também conhecido como Gall – Peters, ou Peters, projeção)
- Homolosine de Goode
- Martelo
- Hobo – Dyer
- Área igual azimutal de Lambert
- Área igual cilíndrica de Lambert
- Mollweide
- Senoidal
- Strebe 1995
- Projeção poliédrica de área igual de Snyder , usada para grades geodésicas .
- Tobler hiperelíptico
- Werner
Equidistante

Se o comprimento do segmento de linha conectando dois pontos projetados no plano é proporcional à distância geodésica (superfície mais curta) entre os dois pontos não projetados no globo, então dizemos que a distância foi preservada entre esses dois pontos. Uma projeção equidistante preserva distâncias de um ou dois pontos especiais a todos os outros pontos. O ponto ou pontos especiais podem ser alongados em uma linha ou segmento de curva quando projetados. Nesse caso, o ponto na linha ou segmento de curva mais próximo do ponto que está sendo medido deve ser usado para medir a distância.
- Carrée de placas : As distâncias dos dois pólos são preservadas, no aspecto equatorial.
- Azimutal equidistante : Distâncias do centro e da borda são preservadas.
- Cônica equidistante : As distâncias dos dois pólos são preservadas, no aspecto equatorial.
- As distâncias cordiformes de Werner do Pólo Norte são preservadas, no aspecto equatorial.
- Dois pontos equidistantes : Dois "pontos de controle" são arbitrariamente escolhidos pelo cartógrafo; as distâncias de cada ponto de controle são preservadas.
Gnomônico

Grandes círculos são exibidos como linhas retas:
Retroazimutal
A direção para um local fixo B (o rumo no local inicial A da rota mais curta) corresponde à direção no mapa de A para B:
- Littrow - a única projeção retroazimutal conformada
- Martelo retroazimutal - também preserva a distância do ponto central
- Craig retroazimutal, também conhecido como Meca ou Qibla, também tem meridianos verticais
Projeções de compromisso

As projeções de compromisso abrem mão da ideia de preservar perfeitamente as propriedades métricas, procurando, em vez disso, encontrar um equilíbrio entre as distorções ou simplesmente fazer as coisas parecerem certas. A maioria desses tipos de projeções distorce a forma nas regiões polares mais do que no equador. Estas são algumas projeções de compromisso:
- Robinson
- van der Grinten
- Miller cilíndrico
- Winkel Tripel
- Dymaxion de Buckminster Fuller
- Mapa da borboleta de BJS Cahill
- Projeção Kavrayskiy VII
- Projeção Wagner VI
- Trimétrico de Chamberlin
- Oronce Finé cordiform 's
- Projeção AuthaGraph
Qual projeção é a melhor?
A matemática da projeção não permite que nenhuma projeção de mapa em particular seja a melhor para tudo. Algo sempre estará distorcido. Assim, muitas projeções existem para servir aos muitos usos de mapas e sua vasta gama de escalas.
Os sistemas de mapeamento nacionais modernos normalmente empregam um Mercator transversal ou uma variante próxima para mapas em grande escala , a fim de preservar a conformidade e a baixa variação de escala em áreas pequenas. Para mapas em escala menor , como aqueles que abrangem continentes ou o mundo inteiro, muitas projeções são comumente usadas de acordo com sua adequação ao propósito, como Winkel tripel , Robinson e Mollweide . Mapas de referência do mundo freqüentemente aparecem em projeções de compromisso . Devido às distorções inerentes a qualquer mapa do mundo, a escolha da projeção torna-se amplamente estética.
Os mapas temáticos normalmente requerem uma projeção de área igual para que os fenômenos por unidade de área sejam mostrados na proporção correta. No entanto, representar as proporções de área corretamente distorce necessariamente as formas mais do que muitos mapas que não são de áreas iguais.
A projeção de Mercator , desenvolvida para fins de navegação, tem sido freqüentemente usada em mapas mundiais onde outras projeções teriam sido mais apropriadas. Este problema é reconhecido há muito tempo, mesmo fora dos círculos profissionais. Por exemplo, um editorial do New York Times de 1943 afirma:
Chegou a hora de descartar [o Mercator] por algo que representa os continentes e direções de forma menos enganosa ... Embora seu uso ... tenha diminuído ... ainda é muito popular como um mapa de parede, aparentemente em parte porque, como um mapa retangular, ele preenche um espaço de parede retangular com mais mapa, e claramente porque sua familiaridade gera mais popularidade.
Uma controvérsia na década de 1980 sobre o mapa de Peters motivou a American Cartographic Association (agora Cartography and Geographic Information Society) a produzir uma série de livretos (incluindo Which Map Is Best ) destinados a educar o público sobre as projeções e distorções dos mapas. Em 1989 e 1990, após algum debate interno, sete organizações geográficas norte-americanas adotaram uma resolução recomendando contra o uso de qualquer projeção retangular (incluindo Mercator e Gall-Peters) para mapas de referência do mundo.
Veja também
Referências
Citações
Fontes
- Fran Evanisko, American River College, palestras para Geografia 20: "Cartographic Design for GIS", outono de 2002
- Map Projections —versões em PDF de várias projeções, criadas e lançadas no domínio público por Paul B. Anderson ... membro da Comissão de Projeções de Mapas da International Cartographic Association
links externos
- "Um álbum de projeções de mapas" (PDF) . (12,6 MB) , US Geological Survey Professional Paper 1453, de John P. Snyder (USGS) e Philip M. Voxland (U. Minnesota), 1989.
- Uma cornucópia de projeções de mapas , uma visualização da distorção em uma vasta gama de projeções de mapas em uma única imagem.
- G.Projector , software livre pode renderizar muitas projeções ( NASA GISS ).
- Imagens coloridas de projeções e distorções de mapas (Mapthematics.com).
- Aspectos geométricos do mapeamento: projeção cartográfica (KartoWeb.itc.nl).
- Projeções de mapas mundiais em Java , Henry Bottomley (SE16.info).
- Projeções de mapas (MathWorld).
- MapRef: a coleção da Internet de MapProjections e sistemas de referência na Europa
- PROJ.4 - Biblioteca de Projeções Cartográficas .
- Tabela de referência de projeção de exemplos e propriedades de todas as projeções comuns (RadicalCartography.net).
- "Compreendendo as projeções de mapas" (PDF) . (1,70 MB) , Melita Kennedy ( Esri ).
- World Map Projections , Stephen Wolfram baseado no trabalho de Yu-Sung Chang ( Wolfram Demonstrations Project ).
- Compare as projeções do mapa
{kind=link}